
| Home |
Mechatronics |
About RMS |
DMC Sub |
Audio Design |
Education |
Sale |
Mechatronics
Mechatronics is the field of engineering that integrates mechanical systems with electronics, electromechanics, measurement systems and control to achieve a motion system that performs according to clearly defined specifications. In the high-tech industry these motion systems move at a very high velocity with extremely small position errors. As an example one can think of a movement range of half a metre with an accuracy of five nanometres (108). In the audio world this ratio would represent a signal to "noise-plus-distortion" ratio of 160 dB! This extreme ratio that is based on a combination of feedforward (open-loop) and feedback control with highly accurate incremental measurement systems and as such they can not be compared with the linear systems that are applied in audio but even the linear parts in these high-tech systems perform orders of magnitude better than the best audio transducers. When measuring sound in a listening room the linear deviation in magnitude over the frequency band is mostly far more than a factor two in power (3dB) while non-linear distortions remain at best just around 1% (-40dB).
The reason of the dramatic difference in performance between the audio and high-tech domain can partly be explained by the huge difference in cost that is allowed to be spent in both technology areas. But that is not the whole story. In fact, due to ignorance of the average consumer and commercial targets of the industry, the consumer side of the audio world is more and more dominated by visually perceived value and marketing rather than by real acoustic value. Most loudspeaker elements that are sold in even prestiguous systems have real cost levels of only a few to maximum a few tens of Euros. In contrast, the cables between the amplifier and the loudspeakers often cost a multitude of that amount without any relation to the real acoustic performance of the system. This lack of real acoustic value is caused in this case by the fact that the same electric current that flows through that cable also flows through the windings of the loudspeaker element and these windings are simply made of plain single-stranded copper with a much higher resistance, inductance and capacitance value than the exotic cables in between. And then the printed circuit boards of the amplifier are even not mentioned, where the current has to pass copper foil of often less than 35 micrometre thick and one millimetre wide. It is "food for thought" for psychologists that the same audio system sounds better when it has a higher cost level and this phenomenon is especially clear with cables. The cables in a high-tech precision machine are only special in that they need to transfer digital information according to international standards and that they often need to be integrated in large assemblies with high mechanical flexibility to transfer power and information to moving parts. No magic of specially designed spades, insulated strands with unique twisting or other beautiful but otherwise useless special effects.
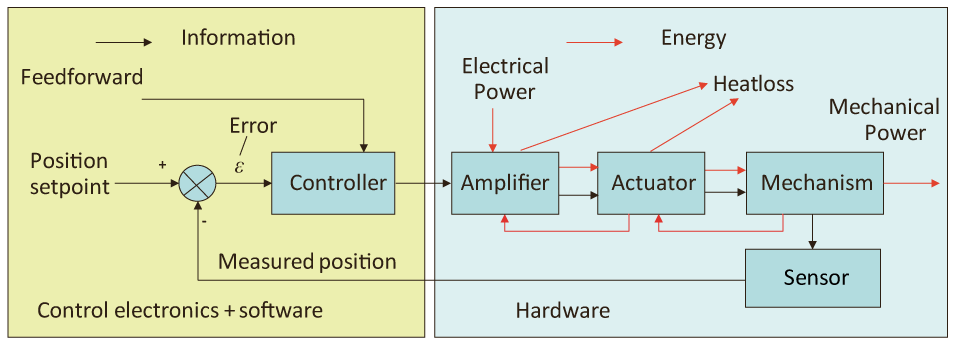
The following figure gives an overview of the elements in a mechatronic system with their interaction.
When applying the mechatronic design principles one starts with the functional requirements (targeted performance) and follows the Systems Architecture line of thought, according to the V-model of the next figure.
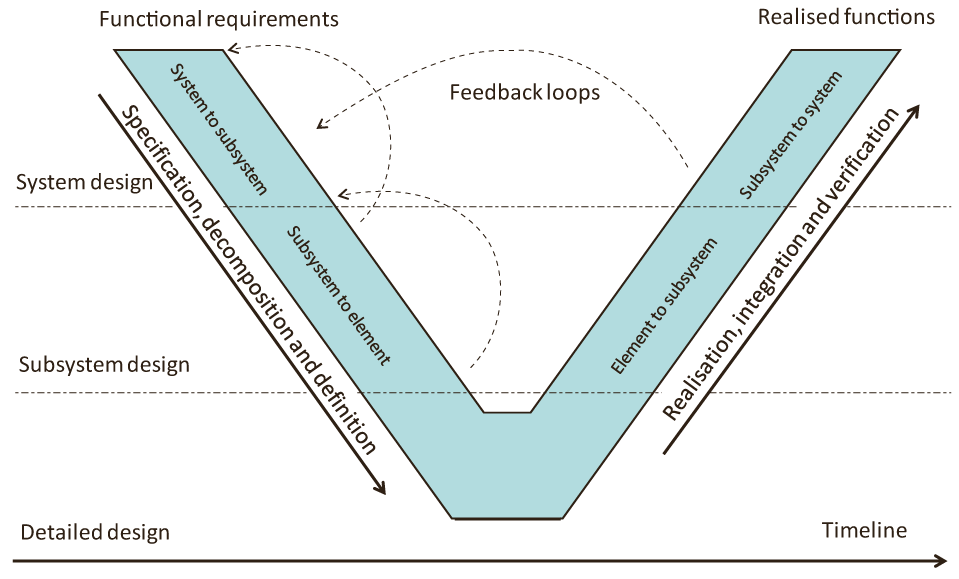
In short the following steps are made according to this model:
- Determination of all influencing elements of the complete system, including the constraints that are imposed by the environment.
- Translation of the requirements and the environmental constraints into achievable specifications.
- Breakdown of the total system into functional subsystems with each their own specifications that combine to the total system specifications.
- Breakdown of the subsystems into detailed parts
- Design, realisation and testing of the detailed parts and integration in the subsystems that are separately tested.
- Integration of the subsystems into the total system, followed bij a final test.
These steps can be repeated in case of non-compliance with the targeted performance. It is also possible to insert another layer with smaller sub-subsystems in the V-model. An amplifier can for instance be split into a pre-amplifier and a power amplifier.
A crucial step that distinguishes this approach from normal high-end audio is the third step, the breakdown in interrelated subsystems. This might look identical to the commonly applied simple split into CD-players, amplifiers and loudspeakers. Unfortunately however, with only a very few exceptions the audio industry has always overly simplified the interface between especially the amplifier, the loudspeaker and the surrounding listening environment.
As an example it is useful to just think of the famed "dampingfactor" of power amplifiers. This term equals the ratio between the nominal resistance of the loudspeaker and the total series impedance that the loudspeaker "sees" at the amplifier output terminals. Its meaning is based on the damping effect on a movement of the loudspeaker cone. This movement will induce a voltage in the coil of the loudspeaker motor. When connected to a low impedance source (amplifier), this voltage creates a current in the impedance of the total conducting loop, consisting of the series connection of the coil, the connecting cables and the internal impedance of the amplifier. This current gives a force in the loudspeaker actuator in the opposite direction of the movement (velocity), taking energy out of the system and increasing the damping of the first resonance frequency. This frequency is in most loudspeakers somewhere between 30 and 60 Hz and at these low frequencies one can neglect the reactive part in the impedance by selfinductance and capacitance. This means that the current and the corresponding damping is only determined by the motion voltage in the coil in combination with the series resistance of the three elements: coil, cables and amplifier (and a filter, when applied).
It can be shown mathematically that the Q value of the resonance is proportional to the total resistance. From practical tests a magnitude difference of 3 dB in the audio signal appears to be just audible and at the resonance frequency this difference is equivalent to a change in Q of 30%. The resistance of the coil is in practice somewhere between 3 and 6 Ohms so with the lowest value of these two a resistance of 1 Ohm for the remaining chain of cables and amplifier would result in a 3 dB change of the response around the resonance frequency. The corresponding dampingfactor of three (3:1) is then just audible, for which reason a value of 10 is generally seen as sufficient. To be safe a number of >20 is often advised but in reality any higher value than 10 has no perceivable influence anymore on the dynamics around the first resonance frequency.
Unfortunately this simplification has resulted in amplifiers with meaningless dampingfactors of well beyond hundred or even a thousand. And these factors are only related to the dynamic performance around the lowest resonance frequency as the breakup modes and other dynamic effects are hardly affected by this damping effect. Furthermore, as an alternative, it is very easy to adapt the other dynamic properties of a loudspeaker, like mass, compliance and Bl value of the motor to achieve a suitable Q value. Especially the BL value has a strong (squared) relation to the Q value. By designing a motor with a high Bl value the loudspeaker can be optimally tuned to even an amplifier with a higher output impedance in the same order of magnitude as the loudspeaker like a tube amplifier with no feedback.
This all means that present day's amplifiers are designed to work with any loudspeaker and present day's loudspeakers are designed to work with any amplifier. Needless to say that this is never optimal, neither from a cost nor from a performance perspective. As a consequence a mechatronic approach on acoustic transducers can only be successful when the total system is integrated.
© 2021 Rob Munnig Schmidt