
| Home |
Mechatronics |
About RMS |
DMC Sub |
Audio Design |
Education |
Kits & Parts |
Large motional feedback system
- Introduction, requirements and system overview
- Power supply
- Input circuit
- Active cross-over filter unit
- LF amplifier with motional feedback
- MF amplifier with special distortion cancellation
- HF MOSFET amplifier with soft clipping
- Protections
Introduction, requirements and system overview
This large active controlled motional feedback loudspeaker system was designed around 1985 based on the original Philips MFB loudspeakers.
As an amateur of both classical and popular music with a main interest in church organ I aimed for a capability to reproduce the entire scale of frequencies of the large 32' chuch organ pipes with a lowest frequency (C-note) of 16.35 Hz. So I started with a preliminary set of requirements (my target specifications) as follows:
- Frequency range: 16-50.000Hz +/- 3 dB, 20-20.000 Hz +/- 1.5 dB.
- A maximum sound pressure level at 1m: 110 dB for normal music (classical, pop, jazz).
- No coloration at any audible frequency, meaning as little as possible resonances, nor delayed responses.
- Distortion well below 1% at any audible frequency.
- Phase aligned cross-over filters so no directional differences in sound radiation.
- Not larger than approximately 0.35 × 0.35 × 1 m3.
Based on these target specs the following concept choices were made:
The woofer
The application of the bass-reflex principle was not assumed to be feasible both because of the low corner frequency of 16 Hz in combination with the relatively small size of the box (for that frequency range) and because of the expected difficulty to control the damping of the resonance. (Later, when learning more about dynamics, I realised that bassreflex systems are a real compromise without any use in hi-end equipment.)
A LF response of 110 dB in a closed box system at 1 meter distance over a hemisphere corresponds to an acoustical effective (RMS) power level from the source of Pa=2×π×r2=6.25×0.1=0.625 WRMS. The required driver-diaphragm radiation surface for that acoustical power level can be calculated by the following expression:

A maximum excursion of 7 mm corresponds to an effective value of the excursion of xd=5 mmRMS. Combined with the necessary power level of 0.625 WRMS, a density of air ρ0=1.2 kg/m2 and the velocity of sound c0=340 m/s, the radiating surface of the loudspeaker would need to be approximately 0.66 m2, corresponding to a diameter of around 90 cm. Such large loudspeakers are not available and for cost reasons I took "only" a 320 mm diameter driver, the largest size for a high quality loudspeaker available at that time. From the possibilities of different brands I decided for the Isophon PSL320-200 because it had a large diameter coil with the permanent magnet inside the coil and an open magnet system to reduce compression and hissing sounds at large excursions, a design that was rare at that time. When asked to make a more modern version of this system I would use (and have used) the Dayton Audio RSS315 HO4 as it has a very long "linear" excursion of +/-14 mm a stiff aluminium diaphragm and a very strong actuator.
The Isophon driver had one wonderful property that made it most suitable to integrate an accelerometer inside the diaphragm. The dome was glued with hot-melt onto the diaphragm which is just visible in the pictures below. This enabled the dome to be separated safely from the diaphragm with a knife, heated by a soldering iron and integrate the acceleration sensor close to the moving coil.
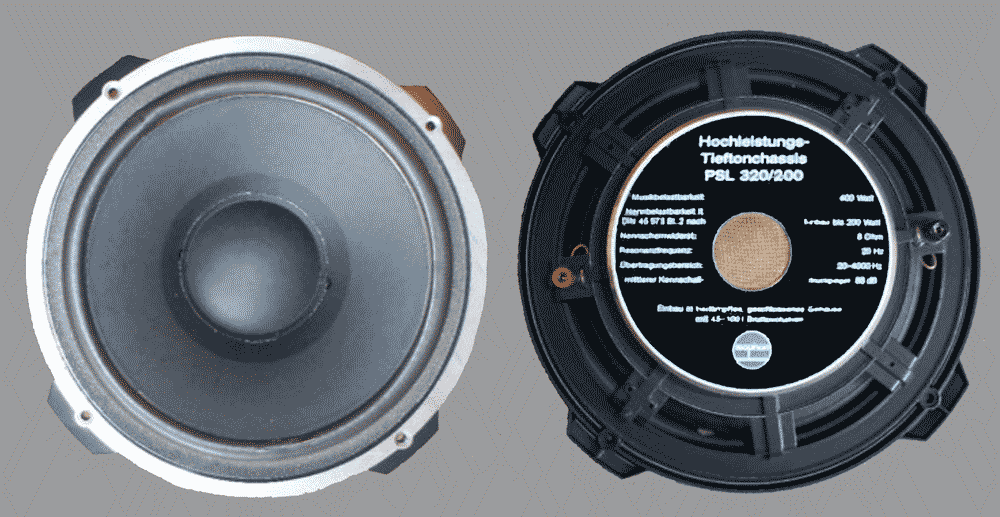
After a few years of use, there appeared to be one problem with the Isophon loudspeakers, because the rubber surround was made of natural rubber foam that deteriorated over time. It became sticky and gradually fell apart. Fortunately I was able to repair them with a new solid non-foam surround and with this repair the drivers have kept functioning well over many years.
A consequence of this smaller size driver with a radiating surface of 0.045 m2 is the theoretical calculated lower radiated power. With above equation this difference is 10×10log(0.045/0.66)2=-23 dB which would imply a maximum resulting sound pressure of only 87 dB @ 1m distance for 16 Hz. One should however be aware of the strange effects that low frequency reproduction has in a confined room with multiple loudspeakers.
First of all the LF signal for both channels in stereo will be approximately equal as also in the recording location the wavelength of the low frequency signals is long (100Hz~3 m;20 Hz~15m). This means that a stereo system will already deliver a factor two in power (=3 dB) more than a mono system if nothing else would happen. But it is also true that the sound pressure of two loudspeakers will add proportional for long wavelengths resulting in a factor two more sound pressure which is 6 dB instead of 3 dB. This increase of efficiency corresponds to the double radiating surface of two loudspeakers. (More on this theory can be found in Volume 3 of Linear audio).
Furthermore I placed the woofers as close as possible to the floor and the wall which increases the acoustic power with another factor two (+3 dB). All in all the system comes about 14 dB short to the specs (96 dB), which is fully acceptable in view of the moderate power levels in normal music at 16 Hz. At 32 Hz this shortcoming is already reduced to -2dB (2nd order slope), being negligible.
But this all is still based on theory on radiation in free field that transmits the sound to infinity. In a confined room with a size smaller than the longest wavelength the pressure will no longer depend on the distance from the loudspeaker only but also on the presence of all walls, the ceiling and the floor, which reflect and constrain the moving air. This makes tuning of the system quite cumbersome.
More technical details on the design are discribed in the section on the LF motional feedback control system.
The midrange driver
The woofer did not have an acceptable response above 500 Hz so it was decided to design a three way system where the woofer is mounted low in the cabinet, guaranteeing a good coupling with the floor (efficiency +3dB). The midrange was mounted as far as possible from the floor to minimise reflections from the floor that would result in frequency dependent sound radiation due to interference between the reflected and direct sound. Based on these floor-to speaker distances, the cross-over frequency was determined to be optimal around 250Hz (wavelength 1.2 m). This low cross-over frequency forced the midrange to be capable of dealing with large amounts of audio power so they had to be relatively large. In the first execution I chose a 7" Eton hexacone driver that behaved as a rigid piston up till around 4 kHz, where it shows a high Q breakup mode. In 2012 I replaced these by the newly introduced Scanspeak Illuminator 12MU/8731T00 ,which can handle the low frequencies with a decent roll off with limited resonances above 5 kHz. Next to an overall excellent designed diaphragm with a damped rubber foam surround (I hope it lasts!) its main unique feature is the underhung motor with rounded cone shaped magnetic part, preventing reflections.


Scanspeak Illuminator speakers midrange 12MU/8731T00 and beryllium tweeter D3004/664000
The tweeter
For the first version I acquired two Technics 10 TH 800 ribbon tweeters at Akihabara in Tokio when I was for a business trip in Japan. These rugged speakers with huge magnets are in fact supertweeters with a upper corner frequency of 50 kHz that made them ready for DSD recordings like SACD, still to be invented at that time.

Unfortunately the relatively high stiffness of the kapton membrane in combination with its low mass gave them a first eigenfrequency and corresponding LF corner frequency of 2.5 kHz. The Linkwitz-Riley 4th order cross-over filter at 2.5 kHz could be designed such that it compensated the linear characteristics of both tweeter and midrange. Still one of my audio visitors remarked that the only flaw in the loudspeakers was "something in the midrange" that was clearly related to this insufficient overlap with dynamic anomalies close to the cross-over frequency with both units. For that reason I also exchanged the tweeters by two Scanspeak tweeters, the Illuminator Beryllium type D3004/664000 as shown above. With this combination of two Illuminator units the overlap in range of both midrange and tweeter became so large that the 2.5 kHz 4th order Linkwitz-Riley filter could more optimally match the responses.
The housing
The closed box enclosure for the woofer is about 70 litres, mostly filled with glass wool to dampen higher frequency resonances and create a bit more effective volume by isothermal compression. The power supply is mounted at the bottom inside the closed woofer compartment with a heat sink protruding at the back side, as shown in the second picture below. The power amplifiers are mounted at the upper back-side of the loudspeaker housing outside on a large Aluminium heat sink. The distance of 50 cm. between power supply and amplifiers limits hum and other mains related interference.


The midrange compartment consists of an S-curved PVC 125 mm diameter sewer-pipe, open from front to back (the brownish dot in the middle of the picture) filled with a dark version of Baileys long hair, acting as a damped transmission line. This type of enclosure cancels almost all sound from the backside, especially with the cone-shape magnet unit of the Scanspeak Illuminator midrange unit.
For the housing of the Scanspeak tweeter I took a 20 cm diameter ball made of POM that is used in Brabant and Limburg for a local game called "Beugelen" an indoor game with a large spoon to throw the heavy balls through round gates and a layer of rough sand on the floor (link: wikipage in Dutch). This sand wears the balls off and after a while they become too small and they are rejected. I got two of these rejected balls and because of the wear it was possible to cover the ball with a layer of epoxy on top of the very rough surface. Otherwise that would be impossible as POM is a polar plastic with bad adhesive properties.
The grid before the woofer is not for preventing children from inverting the dome. It is a necessity to screen the sensitive accelerometer from electrostatic fields.
Overview
The picture below shows the overview of the total system. The input circuit receives either balanced or unbalanced input signals. The balanced signals are used for listening while the unbalanced input is used for testing only. The input circuit also receives an on/off signal from the preamplifier and sends it to the main power supply, located in the bottom of the housing.
The signal is first send to a variable attenuator (overload limiter) that reduces the gain when severe clipping or power overload is detected. The Linkwitz-Riley 4th order cross-over filter gives three signals to each amplifier unit. The LF signal first passes a another dynamic attenuator for the excursion limitation, followed by the motional feedback amplifier/driver combination.
A gold plated power relay switches all driver units simultaneously, delayed after switching on the system, and switches them off immediately at switch off of the system, when the tweeter power is exceeded or when a too large DC voltage is detected on the midrange or woofer.
The values for the sensitivity and gains are the values after tuning the system based on measurements. It will be noticed that in practice the tweeter is a bit more sensitive than the number as noted from the spec sheets. It is also important to note that two drivers will interfere positively at the lower frequency area as the pressure of both drivers will add at long wavelengths. In that case also walls will play a large role as can be seen with the measurements. The value given is for a single loudspeaker.

Results
The system is designed with 200W amplifiers for midrange and woofer. With the given sensitivities the requirements are almost fully complied with two loudspeakers in stereo (+3 dB by dual power and +6 for low frequencies).
The resulting radiated power over frequency has become for normal music (classical, pop, jazz).
- Frequency range: 16-50.000Hz +/- 3 dB with 96dB sound pressure @ 1m distance.
- Frequency range: 32-50.000Hz +/- 3 dB with 110dB sound pressure @ 1m distance.
Room dimensions: It is important to be aware of the issues with the room acoustics as these become dominant at lower frequencies and even prohibitive for pleasant listening. This is caused by the lack of damping even with well designed damping walls and ceilings (in my place these are covered with cement-bound fibre plates at 20 cm distance from the concrete ceiling). Resonances will occur at several eigenmodes (standing waves) with eigenfrequencies that are determined by the basic room dimensions. The location of the nodes and anti-nodes are clearly perceived when moving through the room. Below the lowest eigenfrequency the wavelength is longer than the main dimensions of the room and another phenomenon will occur that has often given rise to the question of the possibility to reproduce low frequency sound in a small room relative to the lowest frequency. This indeed is impaired as can be qualitatively explained with the following reasoning.
Assume an extremely low frequency with a wavelength much larger than the room dimensions. In that case the momentary pressure becomes quasi-static and the transfer of acoustic energy takes place directly from the transducer to the ear, similar to the situation with a headphone. Under the assumption that the room is sufficiently airtight (!) the soundpressure can be calculated from the ratio between the displaced volume of air by the driver diaphragm and the volume of air in the room multiplied with the average atmospheric pressure.

A large room with a dimension of 6*8*2.5 meter will have approximately 125 m2 of air volume. Two 12" woofers with a maximum diaphragm excursion of 7 mm will move a volume of air of only 0.007×0.09=6.3×10-4 m3. With an atmospheric pressure of 105 Pa this diaphragm excursion results in the following average peak sound pressure over the room: 6.3×10/125=0.5 Pa being approximately 88 dB pk and 85 dBRMS. This sound pressure is available at any location in the room which is essentially different from the situation with high frequencies where the sound pressure decreases linear with the distance from the source. Furthermore the sound pressure is now also no longer determined by the velocity of the diaphragm but by its position. And finally no room is ever airtight and at very low frequencies the pressure cannot be kept in the room. In practice, with frequencies in the order of 16-250 Hz, the woofer frequency region is typical a transition region between longer and shorter wavelengths than the room dimensions. With increasing frequency the acoustic power will gradually be concentrated in the nodes and anti-nodes of the standing waves with local maxima and minima in the sound pressure.
This clearly indicates that reproducing sound at low frequencies requires the inclusion of the room into the total design. The company RMS Acoustics and Mechatronics was originally started to investigate this phenomenon and design mechatronic solutions for that problem by means of controlled local damping, multiple subwoofers, modal control and other control methods to achieve a minimum in standing waves to occur. Eventualy the company focused more on the active control of the low frequency driver itself, building on the experience gained in this project. Possbly in the near future active systems will be developed that deal with these acoustic problems
© 2021 Rob Munnig Schmidt