
| Home |
Mechatronics |
About RMS |
DMC Sub |
Audio Design |
Education |
Sale |
Digital Motion Control for Subwoofers
Active control of low frequency loudspeakers is best known under the name of Servo-Subwoofer and Motional Feedback.
Feedback is only a part of the control engineer's toolbox. Feedforward control is as important as feedback because it aims to prevent errors rather than correct them, "preventing is better than curing".
From high-tech mechatronics it is well known to start the design of a motion system with optimised hardware, then as a first step a feedforward controller is used, that is so well tuned to the hardware that ideally only the impact of real unknown factors like randomly changing properties of the hardware and noise need to be reduced by means of feedback.
Some control tasks like tracking of a moving target completely rely on feedback due to the unknown character of the object that must be tracked. With loudspeakers, however, a lot is known in advance like the audio signal itself, if necessary delayed in order to investigate its contents, or the dynamics of the driver, which are determined by its mechanical properties. This well describable deterministic behaviour would allow low-cost computer based solutions and indeed several people have come far in investigating the possibilities for controlling a loudspeaker without feedback.
Unfortunately, however, reality is more stubborn than theory and due to several reasons feedforward correction is in practice only applied for the correction of the frequency responbse in active loudspeakers, without compensation of errors due to non-linear properties of the driver. The resulting distortion can still only be reduced by feedback in the low frequency driver for the following reasons:
- Due to its moving mass and the stiffness of its suspension a loudspeaker driver always shows a resonance at frequency around 30-60 Hz. The damping of this resonance without a connected amplifier is low and mainly determined by the damping of the surround rubber and spider as the acoustic coupling with air is very inefficient. Compensating an undamped resonance is hardly possible as it requires an exact tuning of all variables, which have to remain unchanged over time and temperature.
- Most drivers are designed to be used with a voltage amplifier to increase the damping of the first resonance by means of velocity feedback by short circuiting the motor to a Q value of 0.7-1.2. These values, however, are not sufficient for avoiding delayed resonating sound effects, which would require a Q of 0.5 or -6dB at the first resonance. Compensation is withn this damping possible for the frequency response (bass boost). However, a voltage amplifier is not the best choice.
- With a regular voltage-drive amplifier, with a almost zero ohm source impedance, the current, which determines the radiated sound level, becomes dependent on the coil temperature, which changes rapidly at high input power. Also the selfinductance due to the iron magnet structure causes non-linear effects with related harmonic distortion. The use of a current-drive amplifier prevents such distortion, however then the resonance is no longer damped at all due to its infinite source impedance.
- The force of the actuator of a loudspeaker driver has a highly non-linear relation with current and position, with deviations of more than 30% over the so-called "linear stroke" as specified by the manufacturer. This non-linearity can in theory be compensated although the phase below and after the first resonance differs 180 degrees, which requires the compensation to be dependent of the full frequency content, which is less trivial.
- Finally, loudspeaker drivers are mass produced with significant tolerances, using materials, like rubber, which change over time and temperature. This reduces the potential gain in compensation significantly.
For these reasons a hybrid solution with feedback and feedforward compensation for frequency compensation and feedback to reduce errors due to non-linearity and the llow frequency resonance is the preferred way to go.
In the following a summary of key issues is given to underline and further explain above statements. For those readers who would like to know more about these issues, under tab Audio Design a series of papers with technical details can be downloaded.
Basic Theory and Design Strategy
1: Dynamic behaviour and Feedback

The frequency response of a loudspeaker driver always shows a resonance.
The damping is determined by the amplifier, the controller and the actuator.
The diaphragm of a loudspeaker driver is connected to the voice coil of the actuator (motor). The combined mass of these moving parts determine a resonating eigenmode, when combined with the spring stiffness of the surround suspension and the enclosed air. With most practical drivers the resonance frequency of this eigenmode is located between 30 and 60 Hz.
Below this resonance frequency the response drops with 40dB per decade while above the resonance frequency the response becomes flat. The resulting 2nd order high-pass filter frequency response shows a corresponding phase response from +180o to 0o with a slope that depends on the damping.
The dynamic response can be changed by means of (negative) feedback control. The term "negative" is often omitted but it literally means that the feedback counteracts something. Positive feedback also exists and is used to increase certain effects like in a resonator, however for this summary it is of no importance. For this reason the term "negative" is further omitted.
Three types of feedback control of the diaphragm motion have been tried on a loudspeaker driver:
- Proportional Position Feedback, which creates a force that counteracts the displacement from a reference point. As this force is proportional to the displacement, it acts like a mechanical spring stiffness, which adds to the stiffness (k) of the surround suspension and the enclosed air. As a result the resonance frequency gets higher (the red arrow), which is no improvement.
- Proportional Velocity Feedback, which creates a force that counteracts movement. As this force is proportional to the velocity it acts like a mechanical damper, reducing the Q of the resonance (the yellow arrow). This is favorable, however hardly other beneficial effects on for instance distortion are noted as the effect is limited to the resonance frequency region.
- Proportional acceleration Feedback, which creates a force that counteracts acceleration. This means that it acts like a mass, which is added to the moving mass (m) of the diaphragm and voice coil. As a result the resonance frequency is lowered and if done well to below the just audible frequency of 20 Hz. It also effectively reduces distortion as acceleration of the diaphragm is proportional to the radiated sound.
A first observation is that a normal audio amplifier with a voltage output creates damping, which means that it creates proportional velocity feedback. With basic electronic theory this can be explained as follows: When the diaphragm with voice coil is vibrating, the magnetic field at the voice coil will generate a motion related voltage over the coil. The voltage amplifier will act as a short circuit for this motion voltage from the coil and a current will flow depending mainly on the resistance of the coil. Finally this current will generate a force that counteracts the movement, due to the same magnetic field. This effect is truly feedback!
From these three options acceleration feedback is most favorable for two reasons. Firstly it shifts the first resonance out of the audible frequency range and secondly the increased (virtual!) mass will only respond to the signal setpoint with reduced impact of disturbing non-linearities. The higher the gain in the acceration feedback loop (called loophgain) the smaller the impact of unwanted non-linearities will be.
2: Causes of Non-linearity

A regular loudspeaker driver for low frequencies uses an over-hung coil, larger than the magnetic air-gap.
This reduces the non-linear dependence of the force factor from the movement.
Still a significant non-linearity remains due to the non-homogeneous magnetic field.
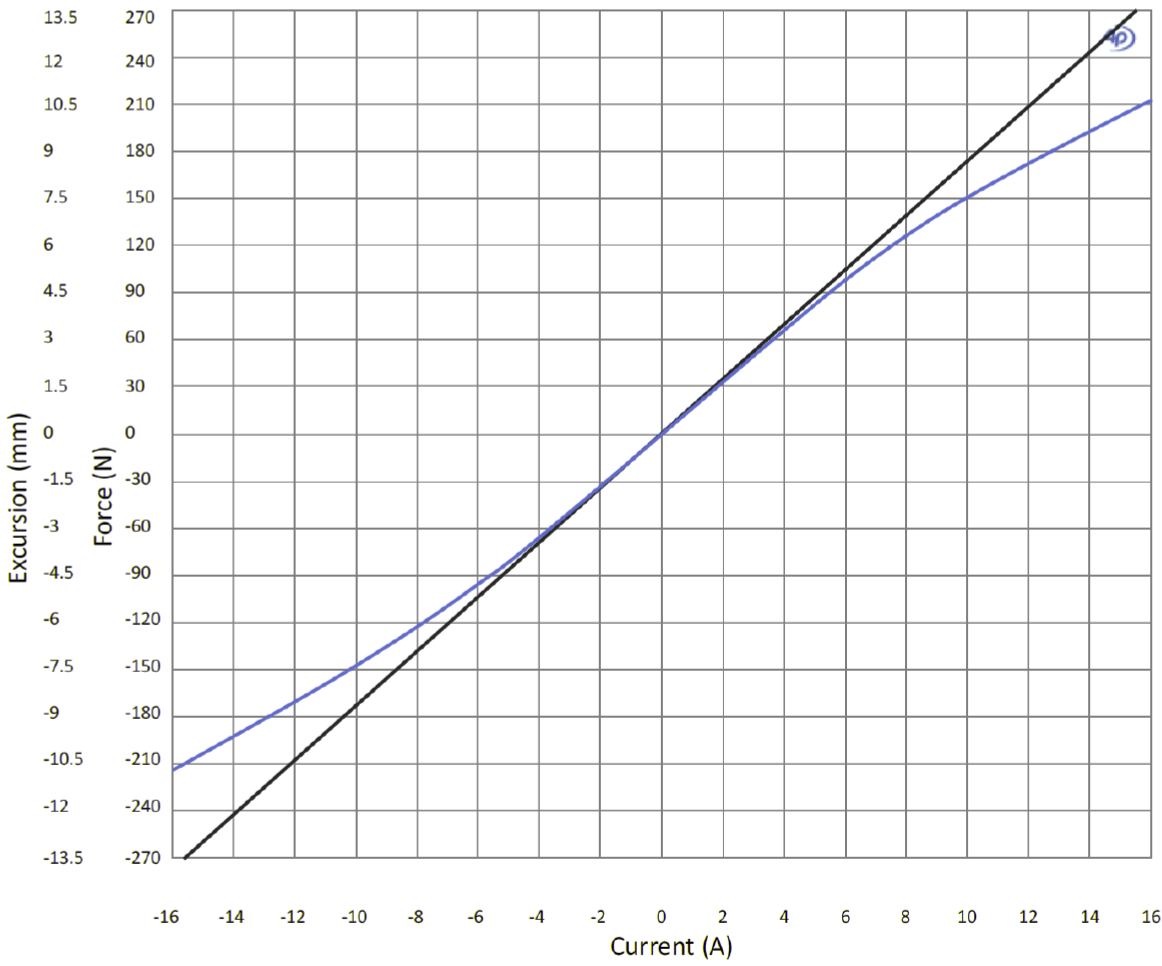
The force-to-current relation of a spring loaded diaphragm from a real loudspeaker driver
shows approximately
30% deviation over +/- 10.5 mm stroke,
while the manufacturer specified the linear stroke to be +/-14 mm.
Above pictures show the highly non-linear properties of the actuator in a loudspeaker driver. It also shows how we let ourselves be "cheated" by driver manufacturers in their specifications. On the other hand it is hardly possible to create a larger linear range without costly measures. It is also true to say that for higher frequencies with normal music the excursion levels will hardly be more than a few millimeter. It is only in the very low frequency range that large excursions are required to produce sufficient sound levels.
Next to this always present source of non-linearity another effect occurs, called "reluctance force", which is a unidirectional force, hence squared related to current (F∝I2), pulling the coil into the magnetic system, independent of the permanent magnet. The resulting distortion is as large as the above described effect and as a result harmonic distortion in uncontrolled hi-end subwoofers can reach values of 50 or even 100% at low frequencies with high sound levels.
3: Current-drive Amplifier vs Voltage-drive Amplifier
It was already mentioned that a voltage-drive amplifier creates damping by velocity feedback. The main drawback of this principle is that the feedback signal is the induced motion voltage in the voice coil by the permanent magnetic field. This signal includes the same source of non-linearity as the force-to-current relation from the actuator, as it is determined by the non homogeneous magnetic field.
A second effect is related to the selfinductance of the voice coil, which is mainly determined by the part of the iron from the permanent magnet system that is located inside the coil. The current in the voice coil will modulate the magnetic field in this iron and due to the near saturation state of this iron by the permanent magnet, another non-linearity occurs in the effect of the selfinductance.
It is well know that this selfinductance
creates a 1st-order low-pass filter characteristic above the frequency where the impedance by the selfinductance becomes larger than the resistance of the voice coil. What is less known is that it also increases distortion in a frequency range where the impedance of the selfinductance dominates but still is low enough to have a significant current flow, because of the near saturated iron inside the voice coil.
Driver manufacturers try to reduce this effect by applying copper rings inside the magnet system to increase the eddy currents, which partly reduce the self-inductance. Unfortunately it is impossible to cancel the effect completely by the electromagnetic design and due to the fact that it is mainly caused by the change of the current, a current-drive amplifier is a better choise as its current is only determined by its input signa;l and not by the driver at ist output. The difference in the frequency response and distortion is shown in below figures.

In the figure at the left the frequency response of a subwoofer driver was measured by an accelerometer with a voltage-drive (blue) or current-drive (red) amplifier. The voltage-drive amplifier clearly reduces the Q (increased damping) of the resonance at 45 Hz, however the response at higher frequencies becomes lower due to the selfinductance. The second resonance peak at 1.8 kHz is due to the accelerometer and the response above that frequency is determined by a lot of breakup resonances. More important is the second plot that clearly shows the difference in distortion from 60 till 200 Hz.
4: Conclusions and Control Strategy Summary
If low distortion and lack of resonances in the useful frequency range is aimed for, the following needs to be done:
- Apply a current-drive amplifier with a sufficiently high output impedance to minimise damping and distortion
- Apply acceleration feedback to virtually shift the resonance frequency to below 16-20 Hz
- Maximise feedback loopgain where the harmonics of the lowest frequencies occur
- Design the controller such that the phase and gain margins are sufficient.
© 2021 Rob Munnig Schmidt